L’IGN réalise actuellement un programme national LIDAR HD (pour « haute définition ») dont l’objectif est de fournir une cartographie 3D de l’intégralité de la surface du territoire français.
Ce nouvel outil peut-il être utile pour les recherches archéologiques ?
Dans une première partie j'examinerai successivement la technique LIDAR, l’objectif du projet et ses atouts et inconvénients du point de vue archéologique. Ensuite je donnerai quelques exemples de construction d’images exploitables à partir des données fournies au public par l’IGN. Enfin, j'envisagerai ce que l’on peut en attendre en pratique.
Dans un deuxième article je décrirai quelques techniques informatiques simples pour obtenir des images exploitables.
1- La technique LIDAR :
Elle consiste à mesurer le temps de retour d’un faisceau laser réfléchi par un obstacle. Ce temps est proportionnel à la distance qui les sépare.
En pratique un avion survole une zone en ligne droite en émettant des impulsions laser dirigées vers le sol.
Du fait de son diamètre, le faisceau laser peut soit rencontrer directement le sol et produire un écho unique, soit rencontrer plusieurs étages d’obstacles (près d’un arbre par exemple) et produire plusieurs échos successifs qui vont correspondre, par exemple, à un point de la canopée, puis à une branche plus basse et enfin au sol.
Il est très important de noter qu’en aucun cas le faisceau laser traverse les obstacles situés sur son passage. En forêt il n’atteindra le sol que par les interstices qui existent dans la frondaison. On comprend donc que les informations recueillies seront moins denses au niveau du sol dans de telles zones.
Par un calcul complexe, les différentes données recueillies dans le périmètre scanné (angle du faisceau laser, temps de retour et intensité de l’écho) vont permettre de constituer un nuage de points d’altitudes variées dont chacun correspond à un impact avec un élément de l’environnement.
Tel quel ce nuage de points n’est pas une image mais un fichier de coordonnées qui contient les renseignements nécessaires pour construire des représentations 2D ou 3D du paysage.
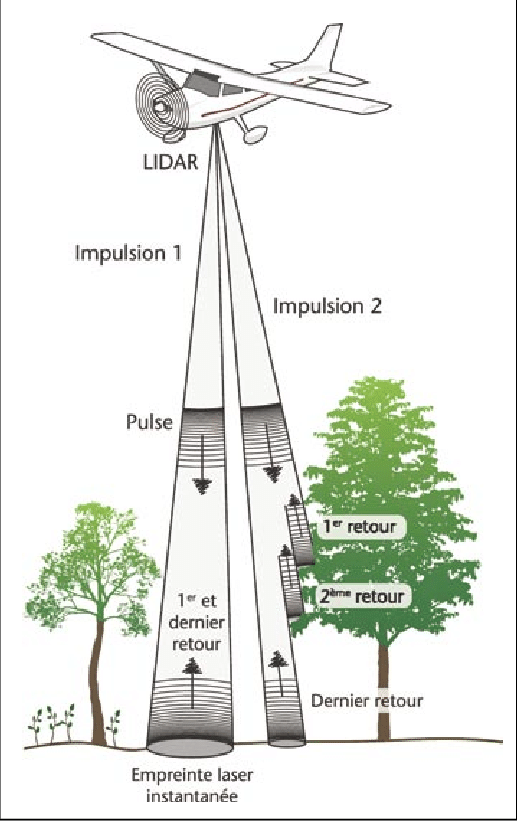
Figure 1 : Acquisition des données
2- Le projet de l’IGN :
Ambitieux, le projet est doté d’un financement de 60 millions d’euros et prévoit un travail de 5 ans comprenant 7000 heures de vol.
Les objectifs principaux sont l’observation de la ressource forestière, la prévention des risques naturels et l’aménagement du territoire.
Il doit fournir en moyenne 10 points par mètre carré du territoire national représentant environ 3 pétaoctets de données (1 pétaoctet = 1000 téraoctets = 10^15 octets).
C’est une définition qui est considérée comme suffisante pour mériter l’appellation HD (haute densité).
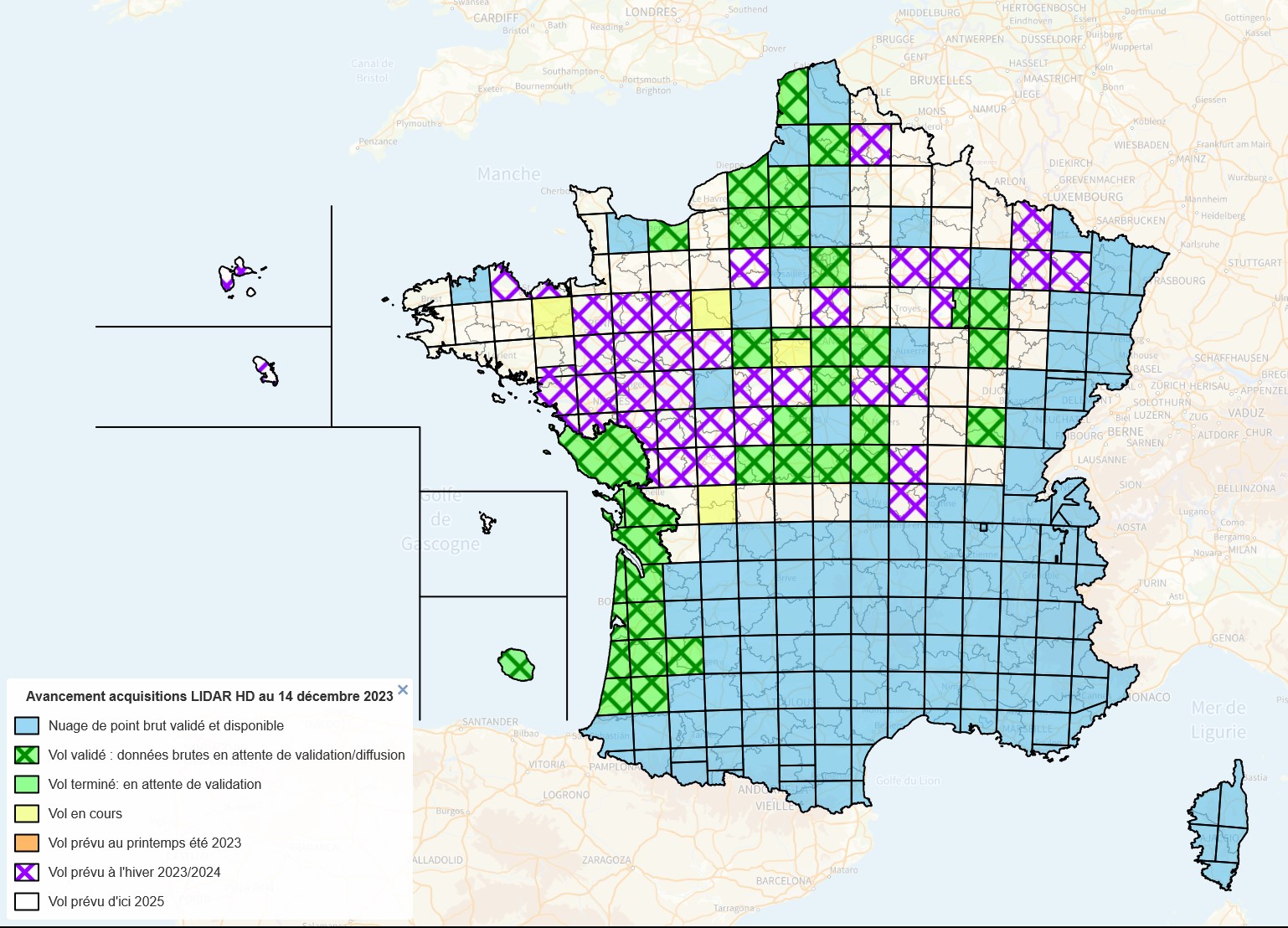
Figure 1 : Avancement du programme LIDAR HD au 14/12/2023 (Schéma IGN)
3- Intérêt et limites du projet pour l’archéologie - le cas des Alpes-Maritimes :
Comme le suggère le principe de l’acquisition des images LIDAR, cet outil innovant présente un intérêt majeur théorique pour l’archéologie par sa capacité à modéliser la surface du sol cachée par la végétation.
Deux périodes d’acquisition des données sont prévues :
- hiver (novembre à mars)
- été (avril à octobre)
Dans les Alpes-Maritimes le travail de terrain est maintenant terminé.
Il a été réalisé en 4 parties :
- Est du 12/5/21au 27/6/21
- Ouest du 13/5/21 au 23/6/21
- Nord du 25/7/21 au 11/9/21
- Sud du 5/6/22 au 29/6/22
On voit que toutes les missions ont été réalisées en été, ce qui est normal compte tenu de l’objectif prioritaire mis en avant dans le quart sud-est de la France (étude de la ressource forestière et du risque incendie). Mais pendant cette saison les données de sol sont bien sûr plus parasitées qu’en hiver par les plantes à feuillage caduque.
D’autre part la couverture du terrain est uniforme alors que les zones de végétation dense nécessiteraient des passages plus fréquents répétés à diverses saisons pour tenter de profiter au mieux des interstices.
Ces quelques limites inhérentes au projet étant posées on va voir que même si l’archéologie n’est pas son objectif principal, le LIDAR apporte néanmoins des informations actuellement impossibles à obtenir par d’autres moyens.
4- Utilisation des nuages de points :
La précision de la localisation spatiale des points est de l’ordre de :
- 10 cm pour l’altimétrie (z)
- 50 cm pour la planimétrie (x et y).
Les données sont fournies par l’IGN sous formes de fichiers de nuages de points qui se présentent sous deux formes :
- des fichiers de données brutes
- des fichiers de données classifiées
Les deux types de fichiers peuvent être utilisés.
Cependant les données classifiées ont l’avantage de contenir des points qui ont été classés dans 11 catégories qui pourront être utilisées de façon indépendante. Les principales sont les suivantes :
01 : non classé (points non permanents, ex : véhicule)
02 : sol
03 : végétation basse (0 à 0,5m)
04 : végétation moyenne (0,5m à 1,5m)
05 : végétation haute (> 1,5m)
06 : bâtiment
09 : eau
65 : Artefact (dont la présence ne peut être expliquée)
Ces données doivent obligatoirement être interprétées dans un logiciel dit « SIG » (Système d’information géographique).
J’ai utilisé QGIS 3.34.1-Prizren, un logiciel SIG libre multiplateforme publié sous licence GPL (GNU General Public License).
Comme expliqué plus haut, l’aspect technique pratique fera l’objet d’un deuxième article.
Voici pour l’instant le résultat des étapes successives de visualisation d’une même zone géographique limitée lors d’un traitement simple (ombrage) :
A- Il est utile d’introduire comme première couche une vue aérienne qui va servir à localiser rapidement la zone qui nous intéresse (source IGN) :
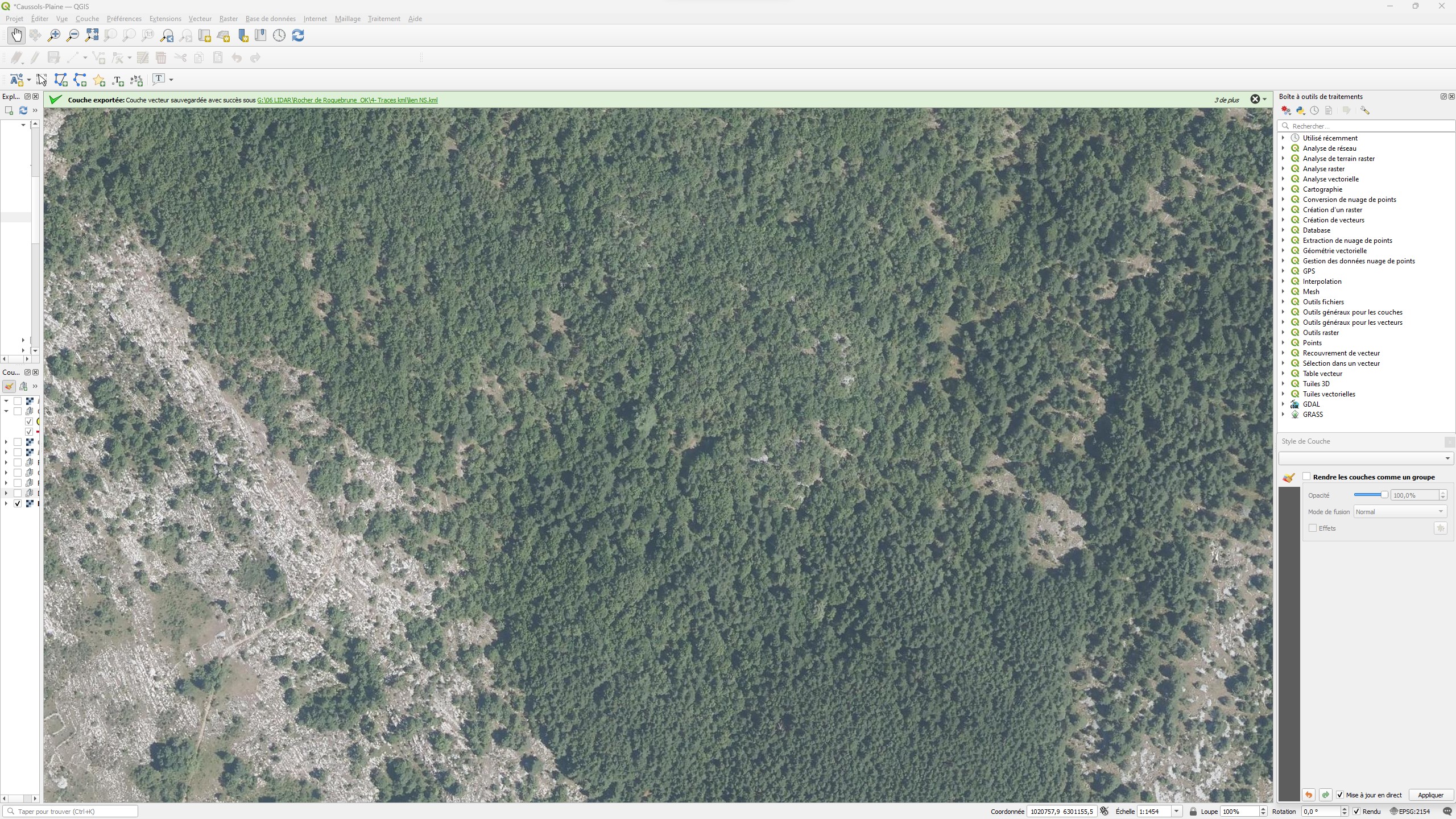
B- Ensuite on ajoute une deuxième couche qui contient la ou les dalles LIDAR HD.
Ici il y en a plusieurs pour couvrir la zone. Les fichiers de données classifiées couvrent chacune un secteur de 1 km2 (1 km x 1 km).
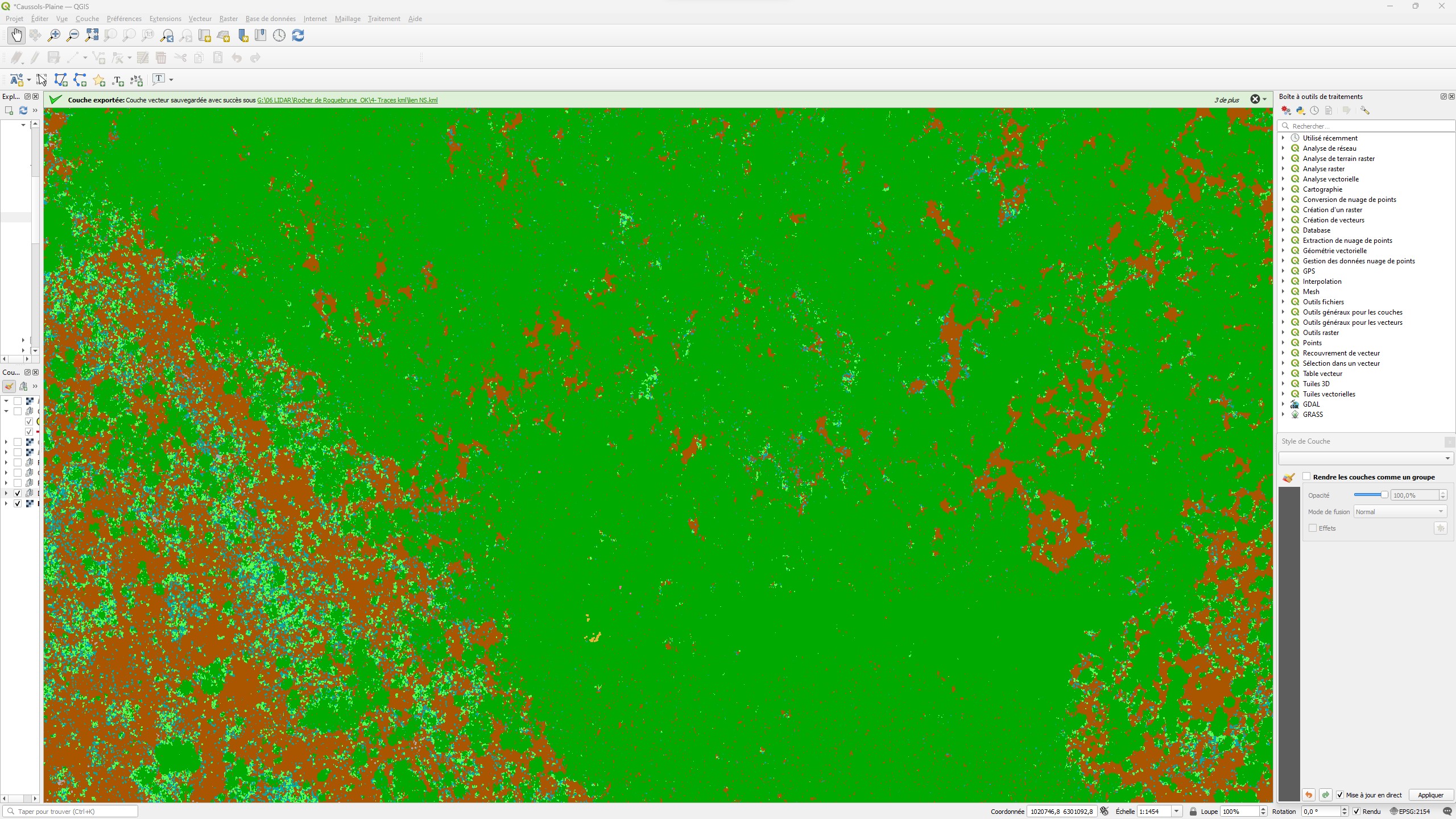
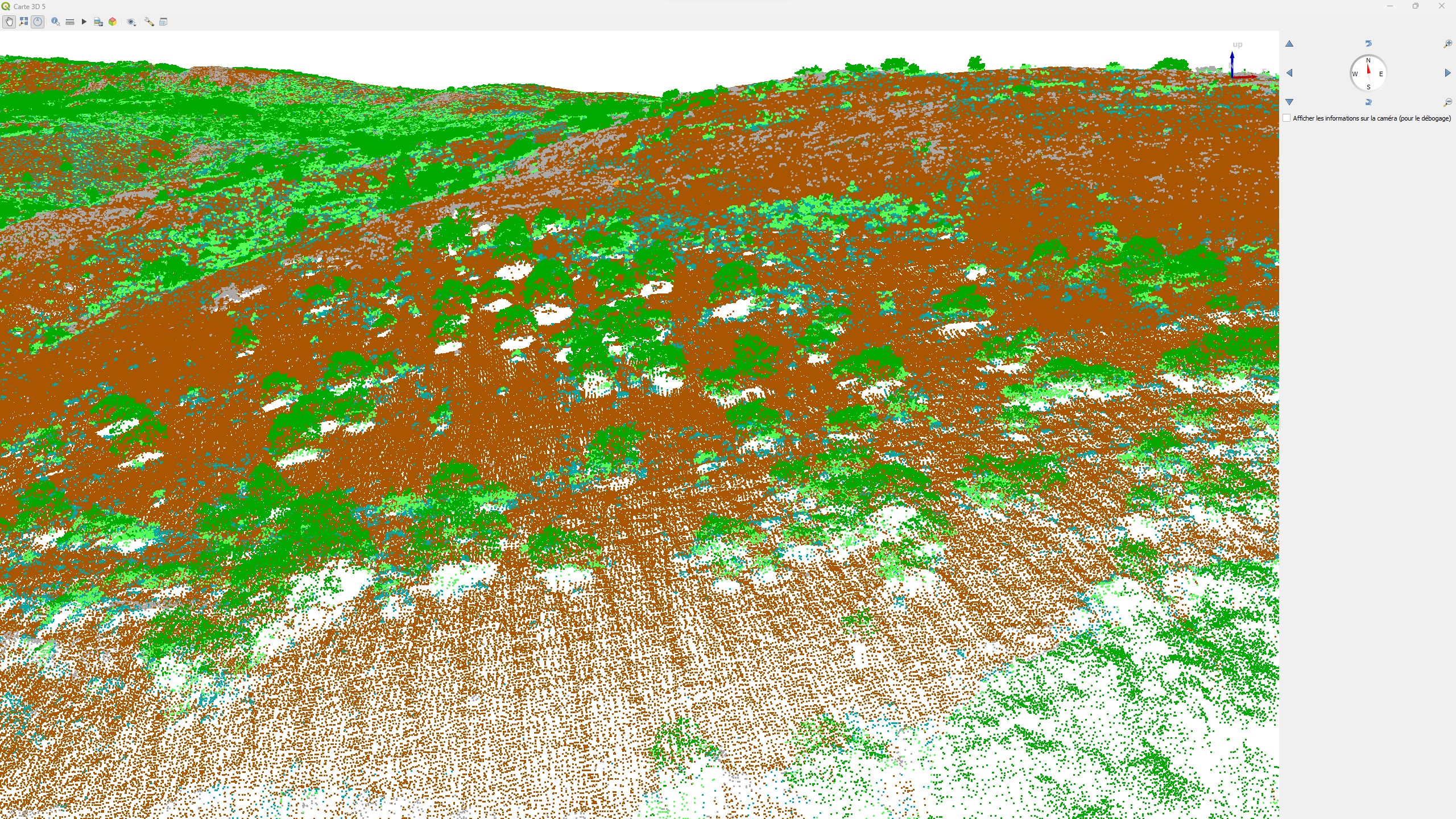
On remarque que les couleurs correspondent à différentes classes. Ici on a en majorité du vert pour la végétation haute et du brun pour le sol.
Lorsqu'il est traduit directement en 3D, on voit mieux à quoi correspond un tel nuage de points:
C- A partir de cette couche on va produire la suivante par un calcul dit de « rastérisation ».
Cela consiste en gros à couvrir un maillage prédéfini à l’aide des points disponibles dans le fichier. Plus le maillage est fin et plus le résultat sera précis, mais plus les calculs seront longs.
Si on se contente d’une trame carrée, l’inconvénient est que dans des zones où l’information est pauvre (forêt dense) on aura un résultat « mité », avec des trous.
Pour éviter cela il est préférable d’utiliser une triangulation (chaque point est relié aux deux plus proches).
Dans ce cas, comme je voulais explorer ce qui se trouve sous la forêt, je n’ai retenu qu’une seule classe pour les calculs : la classe sol (02).
Objectivement, le résultat est encore moins parlant que l’image précédente !
Les quatre zones de densité différentes sont dues au fait qu’il s’agit de dalles différentes. Or, à ce stade, chacune a sa propre échelle de densité en fonction des altitudes maximale et minimale présentes sur la dalle.
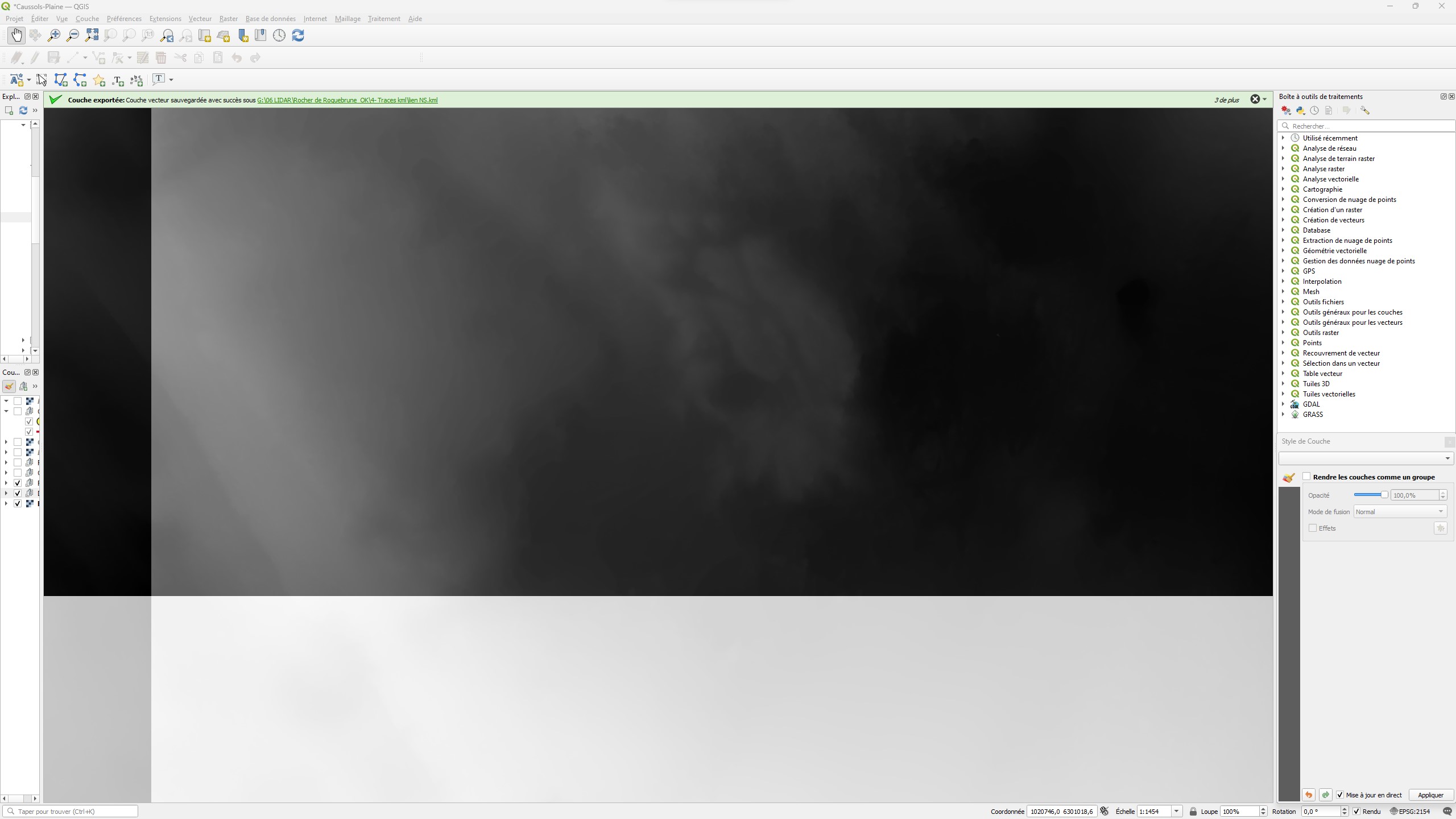
D- Cela s’arrange à l’étape suivante qui est la première qui soit interprétable. J’ai choisi un ombrage qui interprète les altitudes comme si le soleil éclairait le paysage sous un angle particulier.
On s’arrêtera là mais il existe bien d’autres façon de rendre le paysage lisible.
On peut par exemple attribuer une couleur à chaque tranche d’altitude. Cette dernière peut être aussi large ou fine qu’on le souhaite.
En comparant ce résultat avec la vue aérienne de départ, on voit à quel point la technologie LIDAR est intéressante pour visualiser le sol sous la végétation.
On a ici une ancienne zone cultivée abandonnée lors de l’exode rural et qui est recouverte par une forêt relativement récente, environ 70 ans (plateau de Cavillore dans les Alpes-Maritimes).
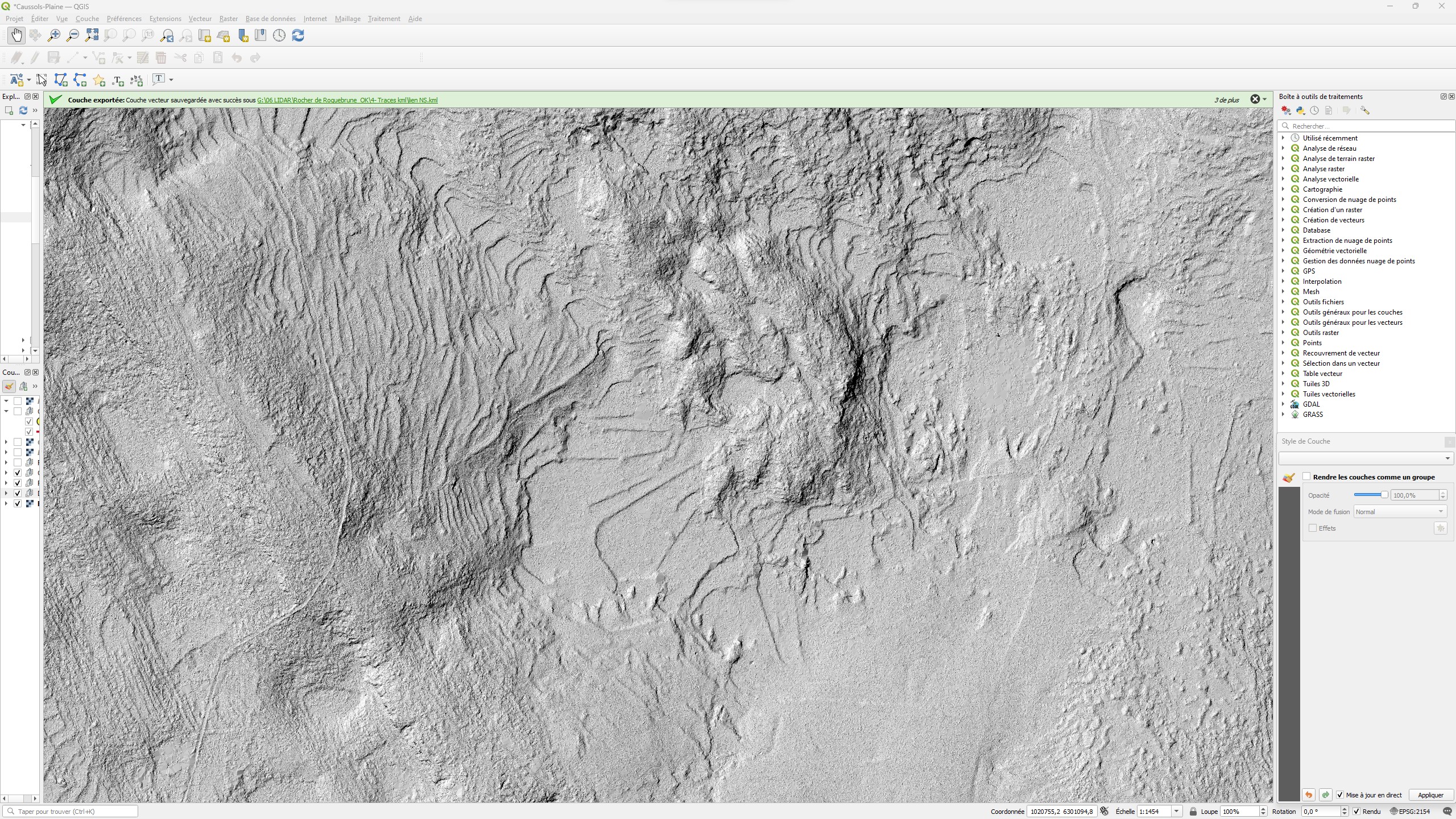
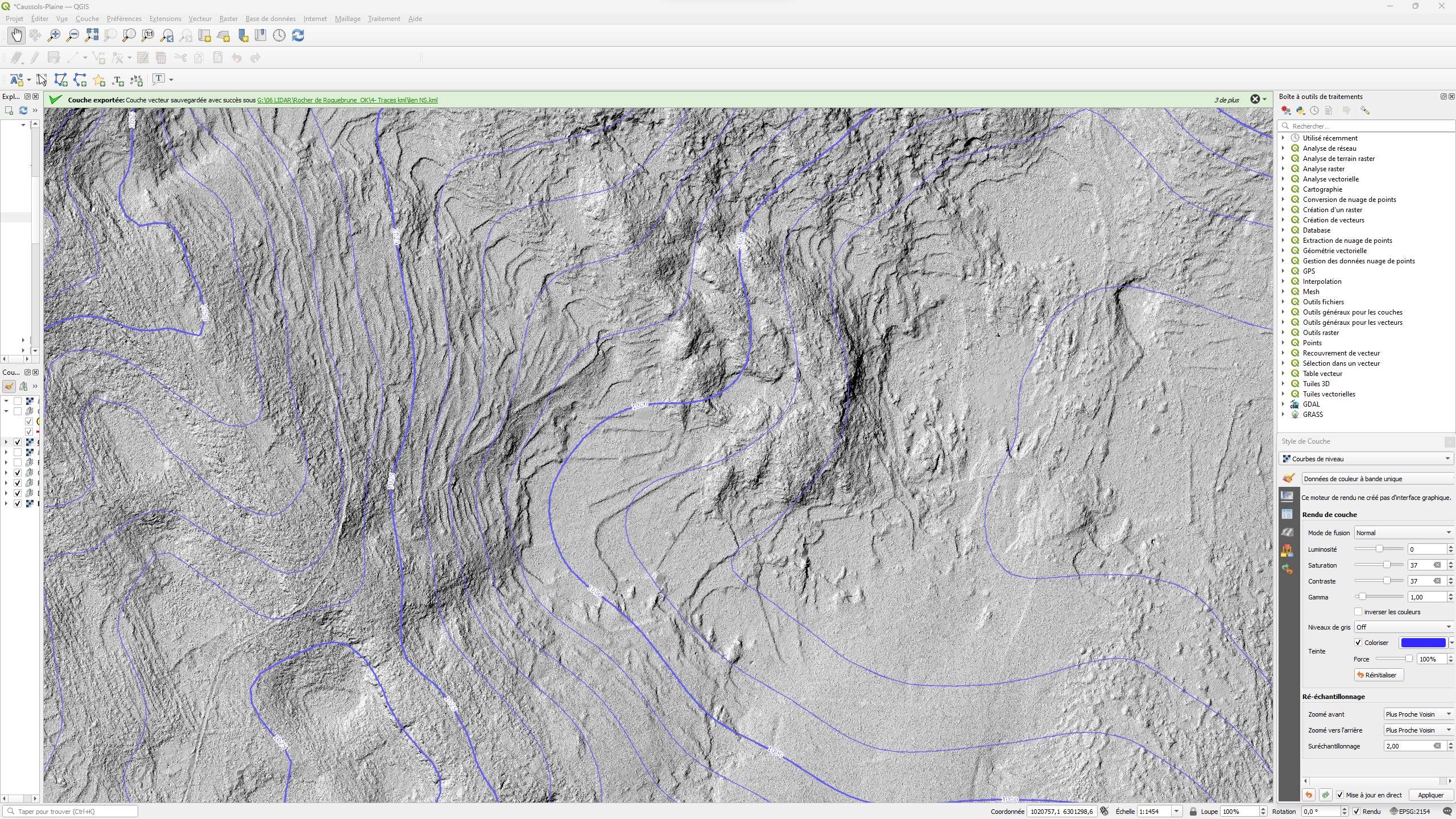
E- On peut encore ajouter des couches qui aident à l’interprétation. Ici j’ai rajouté des courbes de niveau espacées de 5 m (fichier IGN).
5- Interprétation de la visualisation du sol
Je me suis vite rendu compte que la carte LIDAR ne se suffit pas à elle-même car l’interprétation reste délicate malgré sa précision potentielle.
Il est indispensable de la recouper avec des vues aériennes et la documentation la plus complète possible.
Dans le cas suivant, j’ai trouvé rapidement l’emplacement de bâtiments ruinés mais il m’a fallu un bon moment pour qu’un élément pourtant très visible me saute aux yeux.
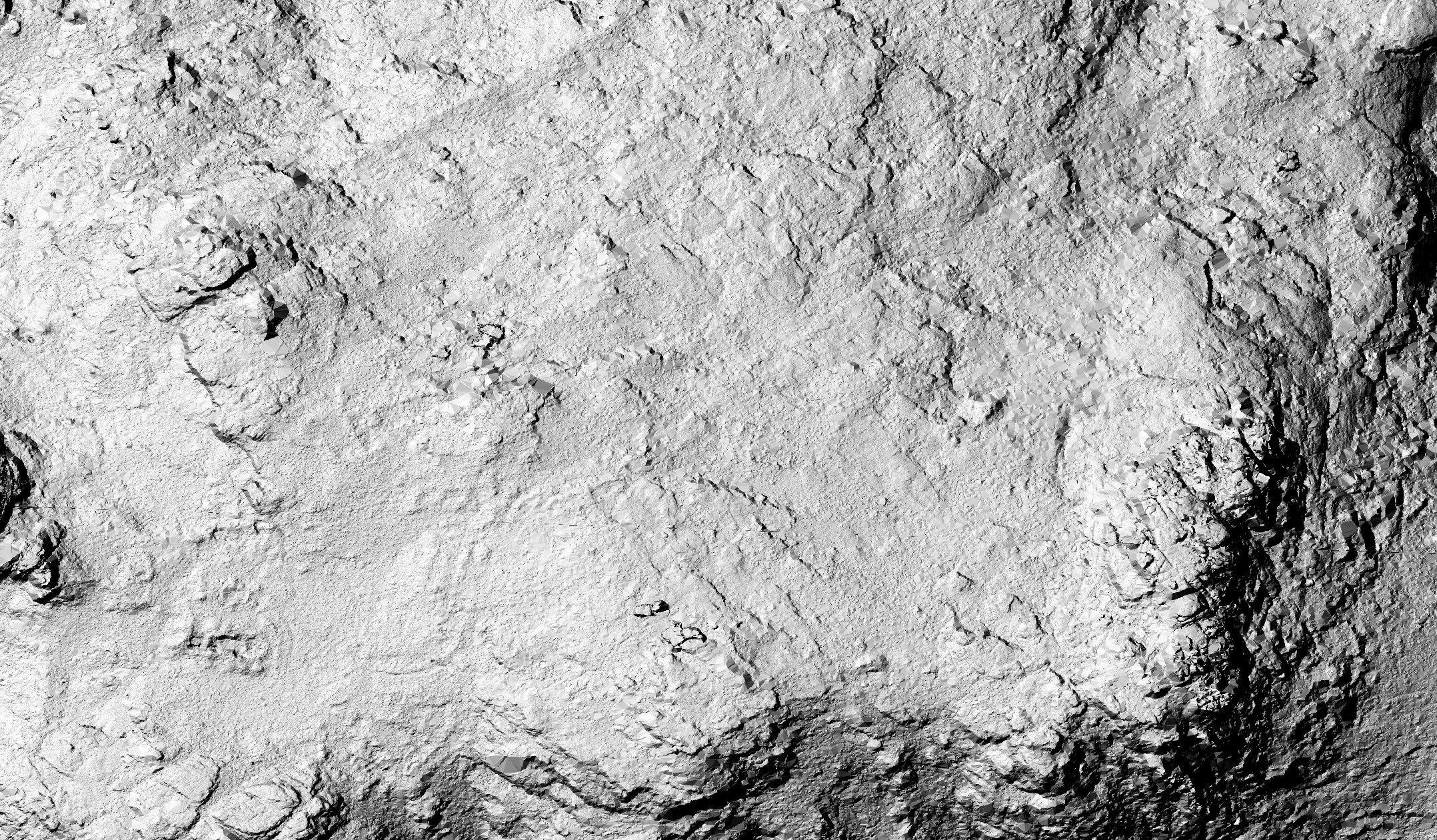
Voici la vue aérienne :

Et maintenant la carte LIDAR avec ombrage :
Les emplacements de bâtiments en bas à gauche sont assez facilement repérables (au moins pour ceux qui ont un dénivelé suffisant).
Par contre il m’a fallu plus de temps pour repérer les deux structures linéaires qui constituent en fait des remparts de pierre sèche:
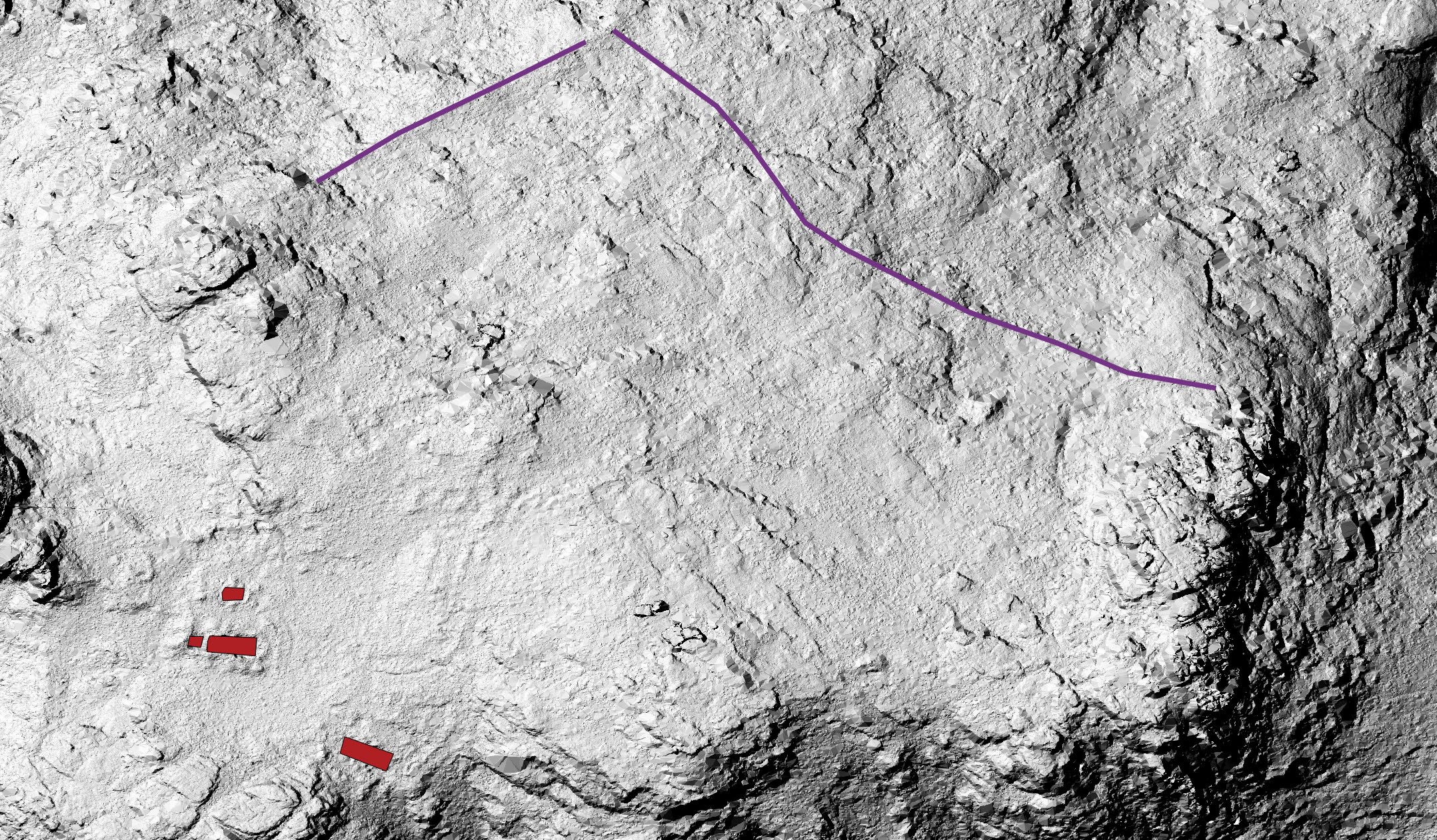
Cela semble normal. Pour toute technique visuelle, se faire l’œil prend du temps et un déplacement sur le terrain semble être un complément indispensable.
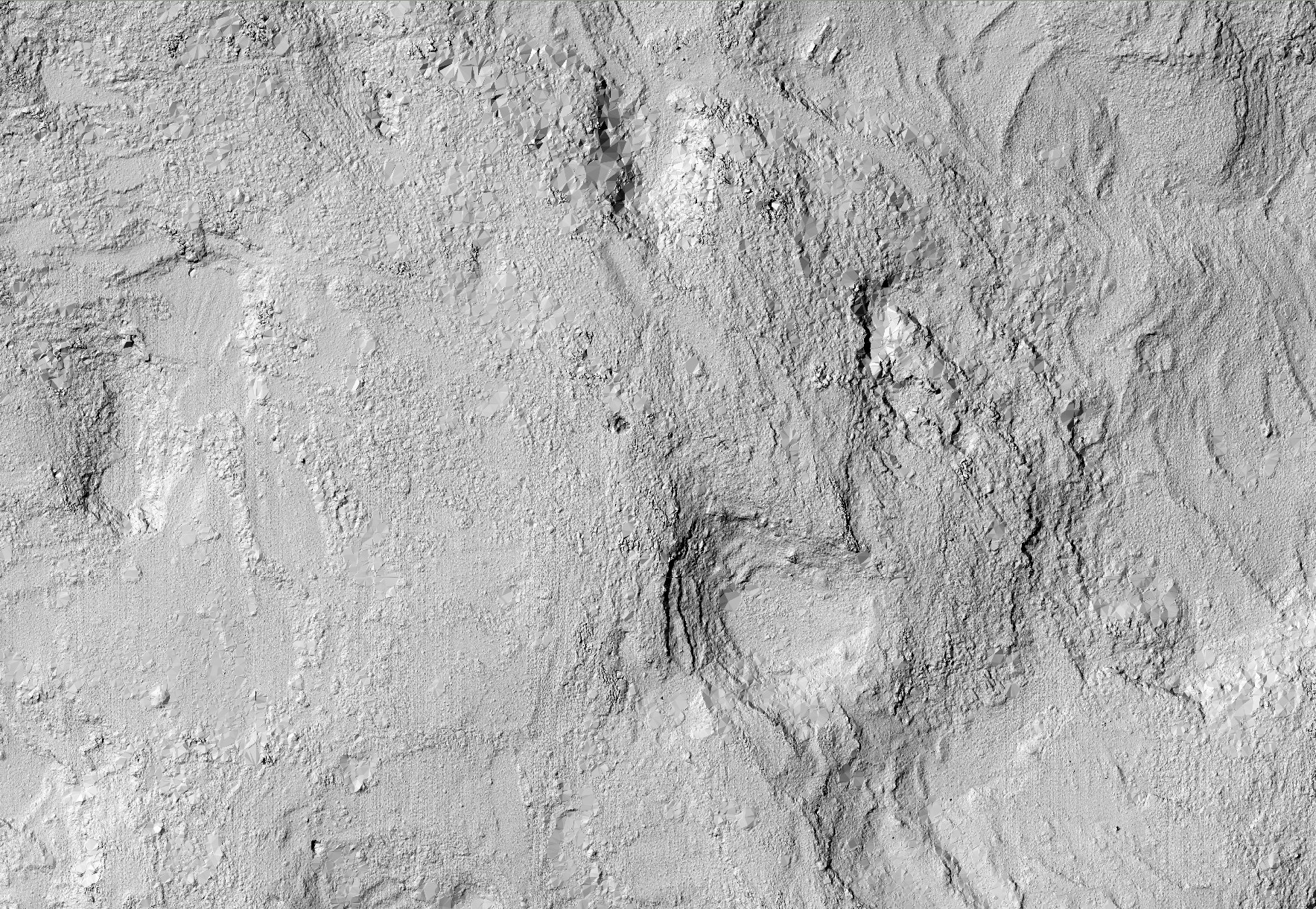
Enfin, le LIDAR semble très efficace pour repérer des cavités dont l’ouverture est parallèle au sol (puits, avens etc.). Ils sont parfois difficiles à visualiser même en l’absence de couverture végétale dense.
Voici un exemple avec ce paysage :

La carte LIDAR m’a permis de trouver en un instant un aven très large que je recherchais sur le terrain et sur les photos aériennes depuis un très long moment. On ne voit que lui (au centre) !
En conclusion, la technique LIDAR HD proposée par l’IGN doit être considérée comme un outil supplémentaire utile pour l’archéologue.
Brieuc Fertard
11/01/2014